В последние годы, в связи со старением общества, увеличением числа заболеваний, связанных с костями, традиционным способом ортопедической хирургии, расположением уязвимых пациентов, точностью управления хирургическими инструментами, личным опытом врачей и уровнем утомляемости, влияние таких факторов влияет на показатель успеха операции и Надежность и, в отличие от традиционной хирургии, робот для костной хирургии может выполняться автоматически, или под командой пассивного выполнения, механическое позиционирование руки вместо безоружного позиционирования врача, стабильность и точность улучшаются.
Навигационное оборудование хирургического робота в клиническом применении становится все более и более широким, и трехмерное изображение является основой внедрения системы навигации хирургического робота и может отображать данные интраоперационной визуализации трехмерной реконструкции, уменьшать операционную ошибку, удовлетворять требованиям операции, имеет двойную роль определения местоположения карты и проверки эффекта, делает операцию более точной, эффект операции более безопасным.
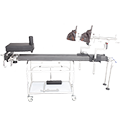
В случае, когда доступны и хирургический робот, и 3D С-дуга, операция все равно не может быть проведена в обычном режиме. Операционный стол также должен быть оборудован, и операционный стол должен соответствовать требованиям как хирургического робота, так и трехмерной С-дуги. Не все хирургические столы могут быть оснащены хирургическими роботами и трехмерными С-дугами, поэтому для достижения оптимальных результатов рентгеноскопии необходим стол из углеродного волокна производства Howell Medical.
Взгляните на следующую картинку. Операционный стол с двумя колоннами , сверхдлинное перспективное пространство и аксессуары для хирургии позвоночника можно использовать для завершения операции на позвоночнике. Вытяжение нижних конечностей и другие аксессуары также могут использоваться в соответствии с требованиями для удовлетворения дополнительных хирургических потребностей.